CN

The digital twin intelligent operations center of intelligent connected vehicle deeply integrates the front key technologies such as automobile sensor, high-precision map, network cloud platform, information security, etc., comprehensively covers relevant data of vehicle intelligent network connection, seamlessly integrates digital twin scenes such as city, traffic network, traffic facilities and vehicles, to realize intelligent vehicle-road coordination and intelligent traffic monitoring and management.
 Online Simulation
Online Simulation
The road digital twin is constructed to integrate and the data of road tests and urban operations, realizing the simulation and deep learning of the complex environment encountered by the autonomous vehicles.
 Breaking the "Isolated Island"
Breaking the "Isolated Island"
The "data island" of vertical service system is broken and a data aggregation and sharing mechanism is established to conduct fusion application test on roadside data and various data.
 Unified Resource Scheduling
Unified Resource Scheduling
The vertical business system is managed uniformly to realize resource integration and unified scheduling, and helps to tests and verifies automatic vehicles, components and business models.
 Real-time Situation Perception
Real-time Situation Perception
An overview of the equipment distribution in the demonstration area is supported from macro-to micro-level, to present the cooperative operation of automatic vehicles and roads in the block under the real scene mode.
 Green Travel
Green Travel
The arrangement and scheduling of stops for unmanned transport and shared bicycle can meet the people’s travel demand by analyzing the people flow trend in different regions and different time periods and in combination with the layout and operation of unmanned public transport.
 Test Run
Test Run
Vehicle static and dynamic data, unmanned line planning data and other data are integrated to test the performance and operation capability of unmanned vehicle, to visually assist managers in effectively managing of vehicle and route planning, and to improve unmanned operation efficiency.
 Efficient Travel
Efficient Travel
Real-time perception and visual presentation of traffic situation of the whole area, block and intersection are conducted to find out the congested road condition, diagnose the problem, and give the simulation scheme based on the actual data so as to intelligently optimize the traffic.
 Safe Travel
Safe Travel
The whole process of event location, video verification, traffic simulation, accident handling and summary report are presented to master the overall situation of emergencies and deduction of disposal scheme in real time, and to assist decision-making scientifically.
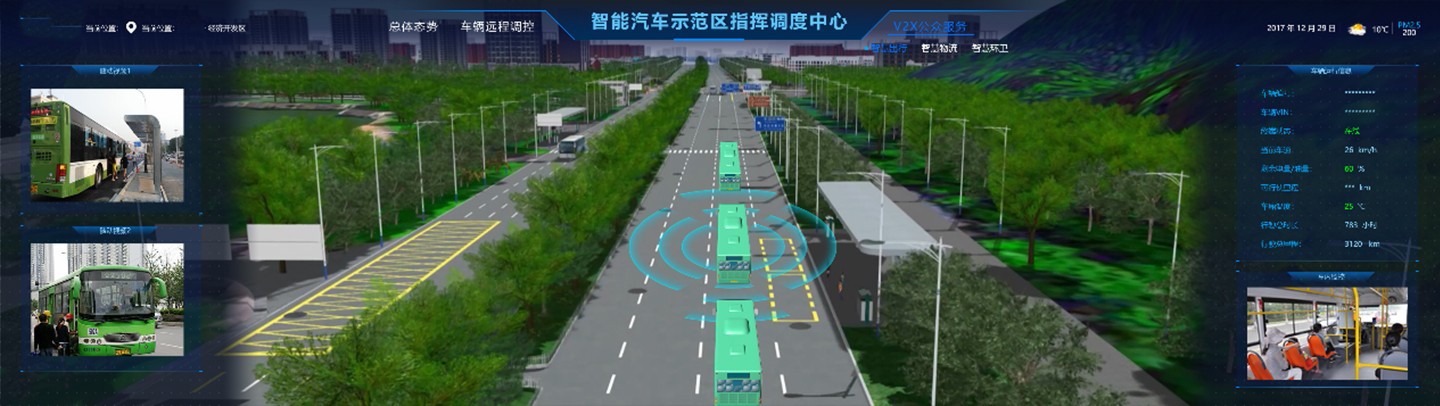
Under the high cooperation of "vehicle-road-cloud", three automatic application scenarios of intelligent travel, intelligent logistics and intelligent environmental sanitation are realized to carry out real-time monitoring such as remote scheduling, location tracking, track playback, vehicle performance status monitoring, etc. for automatic vehicles, and to exploring the concept of "intelligent vehicle, smart road" in the demonstration area.
Singapore office: 120 Robinson Road #13-01 Singapore 068913
Office Address: Room 2110, Unit 2, Building 9, Tianfu New Valley, Wuhou District, Chengdu,Sichuan Province
Office Address:Room 1504, Unit 5, Building 11, Guojinhua Mansion, Weiyang District, Xi'an , Shanxi Province
Office Address: Room 1701, Zifang Building, 3333 Shuanglong Avenue, Jiangning District, Nanjing,Jiangsu Province
